
Your privacy is very important for us. When you visit our website, please agree to the use of all cookies. For more information about the processing of personal data, please go to Privacy Policy.

Benchmark cases cover Retail, E-Commerce, Tobacco, Pharma & Healthcare, Electronic Communication, Electric Power, Automobile, Petrochemical, Cold Chain, New Energy, Home Appliances, Home Furnishing etc.

Our independently developed logistics robots streamline every stage of your operations—from production and storage to picking, packaging, and inbound/outbound processes.
Our services deliver tailored, reliable solutions to optimize your operations and ensure high-quality, efficient logistics management.
Founded in 1993, BlueSword is a leading solution provider of modular and automated warehouse logistics systems. We offer reliable and innovative solutions through consulting, software, manufacturing, and integration services.


News
High efficiency, high flexibility, sustainability, and unmanned are the ultimate goals pursued by smart warehousing and logistics systems. They should not only ensure the improvement of operational efficiency, but also achieve flexibility and scalability, avoid operational pressure caused by heavy asset investment, and quickly achieve benefit recovery. In the storage link in the front area of Binzhou tobacco warehouse, the unmanned storage system with "Asian elephant intelligent loading/unloading robot" as the core was innovatively adopted, which effectively reduced the number of workers in each link and further improved the digital management level of Binzhou tobacco.
Intelligent unloading
The intelligent loading/unloading robot system is based on the intelligent loading/unloading robot as the core, combined with equipment such as backend scanning, posture adjustment, material box conveying, robot palletizing, automatic pallet disassembly, pallet conveying, AGV handling, etc., to achieve functions such as automatic unloading, automatic scanning, automatic palletizing, and automatic inbound and outbound of cardboard boxes.
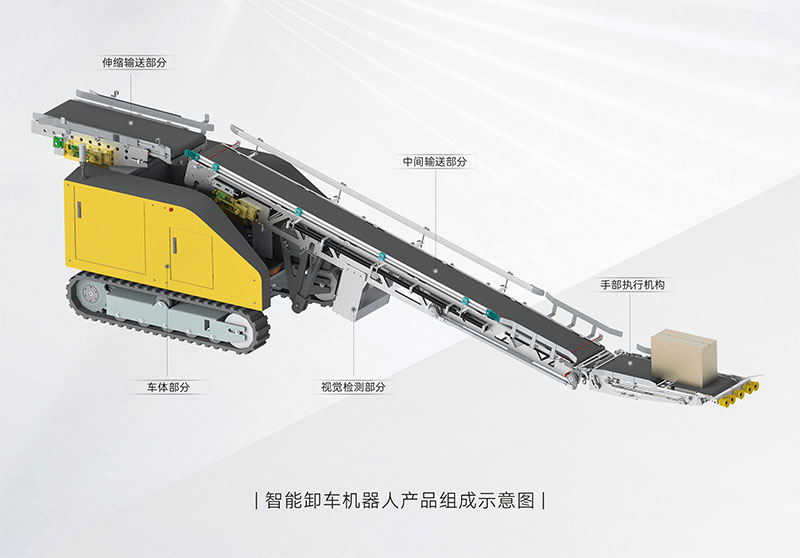
The core equipment of the intelligent loading/unloading robot is composed of five parts: telescopic conveying, vehicle body, intermediate conveying, visual inspection, and hand execution mechanism.
Extreme efficiency
By using 3D visual recognition technology, the status, quantity, and posture of the cardboard boxes inside the car can be quickly identified, and the optimal grabbing sequence can be arranged. The use of dedicated fixtures can achieve dual box grabbing, with unloading efficiency of up to 800-900 pieces/hour.

Stronger adaptability
Using linkage control technology and the company's self-developed 3D vision algorithm, the cardboard boxes inside the carriage are automatically positioned through visual photography, and the position and posture of the cardboard boxes are analyzed to adapt to the automatic unloading of various stack types and sizes of cardboard boxes. Currently, it can meet the flexible gripping requirements of 200-800mm (length, width, and height) cardboard boxes, with a single box gripping weight of up to 50kg.
The body adopts a tracked chassis to better adapt to complex working conditions with uneven bottom surfaces of different carriages, ensuring stable operation of the equipment, and the maximum climbing angle can reach 8 °.

Adapt to different models, meet the unloading requirements of all Box truck of 7.6 meters and above, and adjust the height through the lifting platform to quickly match with the unloading vehicles.

It can work efficiently in a non condensing environment with a temperature of -5 ℃ -40 ℃ and a humidity of 10% -90%, making it more adaptable to the environment.
Outstanding flexibility
Adapting to the rotation of multiple unloading ports, one equipment can meet the rotation requirements of multiple platforms, effectively saving investment costs and improving equipment efficiency.
The length and height of the connecting telescopic roller line can be flexibly adjusted, saving space and flexibly matching with the front and rear equipment.
The automatic loading function can be realized under the condition of little hardware change, that is, the loading and unloading integration can be switched quickly. One equipment can meet the Functional requirement of unloading and loading.

Safe and reliable
The intelligent loading/unloading robot adopts various safety detection, safety alarm, and safety protection measures to ensure the safety of people, vehicles, and goods in multiple ways. Adopting SLAM natural navigation mode, the front end of the body is equipped with obstacle avoidance devices for obstacle detection when moving forward or backward, achieving 360 ° comprehensive obstacle avoidance. When there are obstacles blocking, the equipment automatically stops running.
There are anti-collision detection switches on both sides of the body arm, and detection devices are installed at the bottom. When the robot arm contacts the side wall of the cargo box, it will immediately stop moving. At the same time, a safety control module is added to the system to automatically determine the maximum swing range of the arm based on the size of the vehicle, preventing damage to the side and top walls of the vehicle by the robot.

Easy to operate
The body weight is less than 1.5T, with a small footprint and convenient and flexible driving operation.
Adopting SLAM natural navigation mode, it automatically reaches the unloading port position after startup, and has a dual task distribution method of WCS direct task distribution and manual task creation.
After unloading the complete cardboard box, the robot automatically moves forward, achieving automatic positioning and deviation correction during the walking process.
After the task is completed, the device automatically returns to the starting docking point.
When encountering an alarm during the unloading process, the alarm can be quickly cleared by pressing the reset button to continue completing the task.

simple maintenance
Reserve multiple maintenance ports to facilitate the maintenance and upkeep of mechanical and electrical parts of the equipment, and extend the service life of accessories.

Connecting telescopic roller conveyor line
After the intelligent loading/unloading robot completes the unloading of the cardboard box, it is connected by the telescopic conveyor line.
The telescopic conveyor line is a conveyor that utilizes expandable components as a frame, and the body can flexibly change direction, achieving a maximum of 180 ° free turning. The height of the legs can also be flexibly adjusted, and the lower part is equipped with casters for automatic movement, making it very convenient to connect with the front and rear devices.
The telescopic conveyor line can be divided into multiple sections and used in combination according to demand, with a single section expansion ratio of up to 1:2.5. The maximum length of the centerline body of the project can be expanded to 24 meters, and the shortest length can be reduced to 9.6 meters after compression. According to the flexible planning of the on-site layout, the expansion can meet the requirements of robots entering the farthest end of the carriage, and in non operational scenarios, the compression can meet the requirements of tight on-site storage space, greatly saving land area.

Boundary dimension inspection
The height and width of the cardboard boxes transported by the telescopic conveyor line can be measured by the external dimension detection equipment, which can preliminarily determine the conveying posture of the cardboard boxes and provide a basis for determining the final placement posture of the cardboard boxes.

Hexagonal scanning barcode recognition
After the carton passes the boundary dimension detection, it enters the bar code scanning link. Six Barcode reader are configured to realize the omni-directional scanning of six sides of the carton. By identifying the specific position of the barcode on the cardboard box, the final posture of the cardboard box is determined, and then the adjustment of the cardboard box posture is completed through the flipping mechanism. The information is synchronously fed back to the upper computer system and uploaded to Project 1.

Robot automatic stacking
After barcode recognition and posture adjustment, the cardboard box enters the corresponding stacking position and is automatically stacked by a robotic arm. The robotic arm adopts a four axis stacking robot, which can achieve automatic stacking of various box types. A special design is made for the exclusive fixture of the robotic arm, which has the function of preventing the cardboard box from falling during the clamping process, effectively ensuring the safety of the goods.

AGV warehousing and handling
The palletized goods are transported to the AGV docking position through a pallet conveyor line, and are then stored and shelved through two electric stacking AGVs and two fully forward moving AGVs. The Lan Jian intelligent AGV handling robot adopts a composite navigation method mainly based on laser SLAM navigation, and quickly completes the handling and shelving tasks through multi vehicle coordination scheduling algorithm. The comprehensive warehousing efficiency can reach 15 pallets/hour/unit.

Fill out your information, BlueSword will provide you professional service!
























